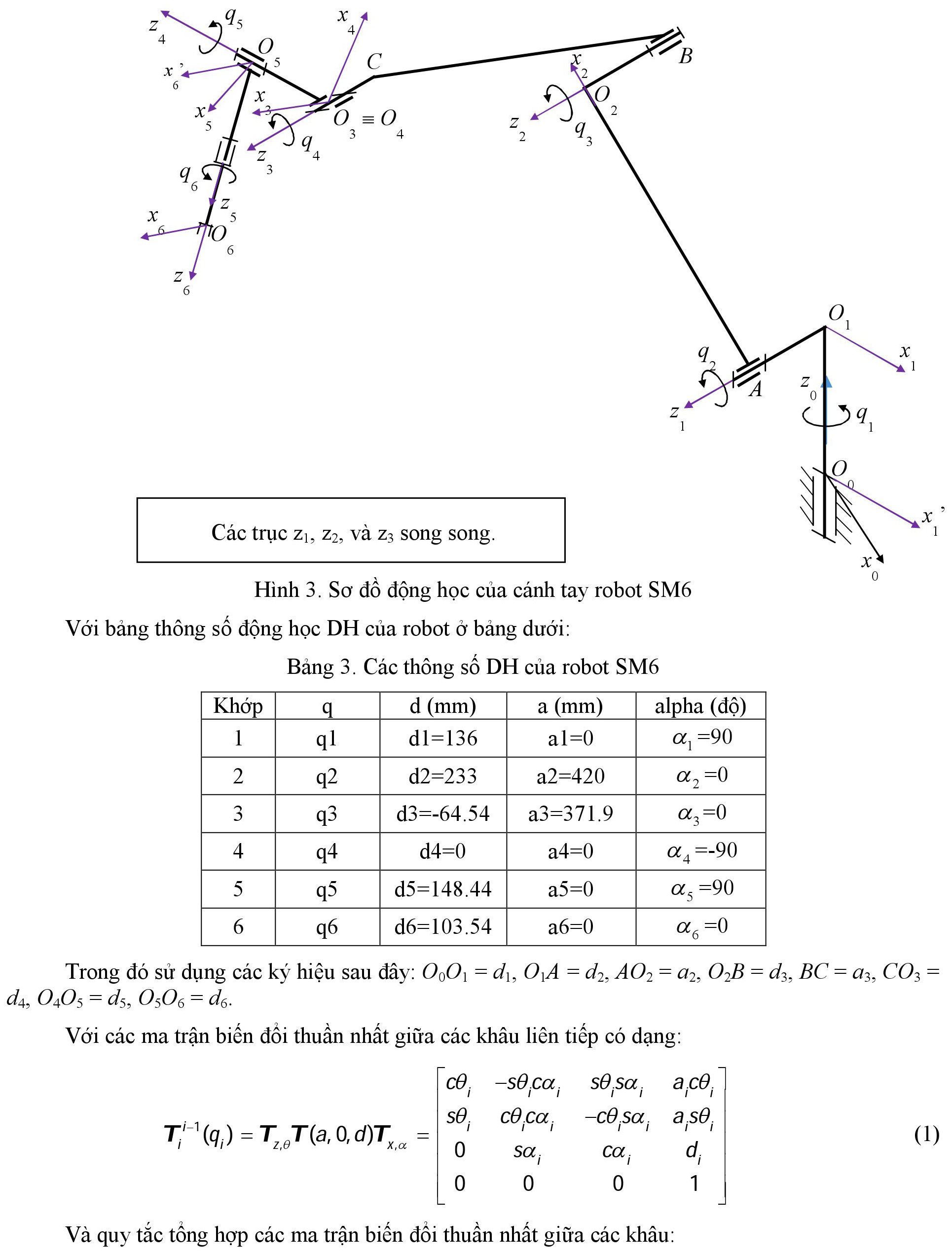
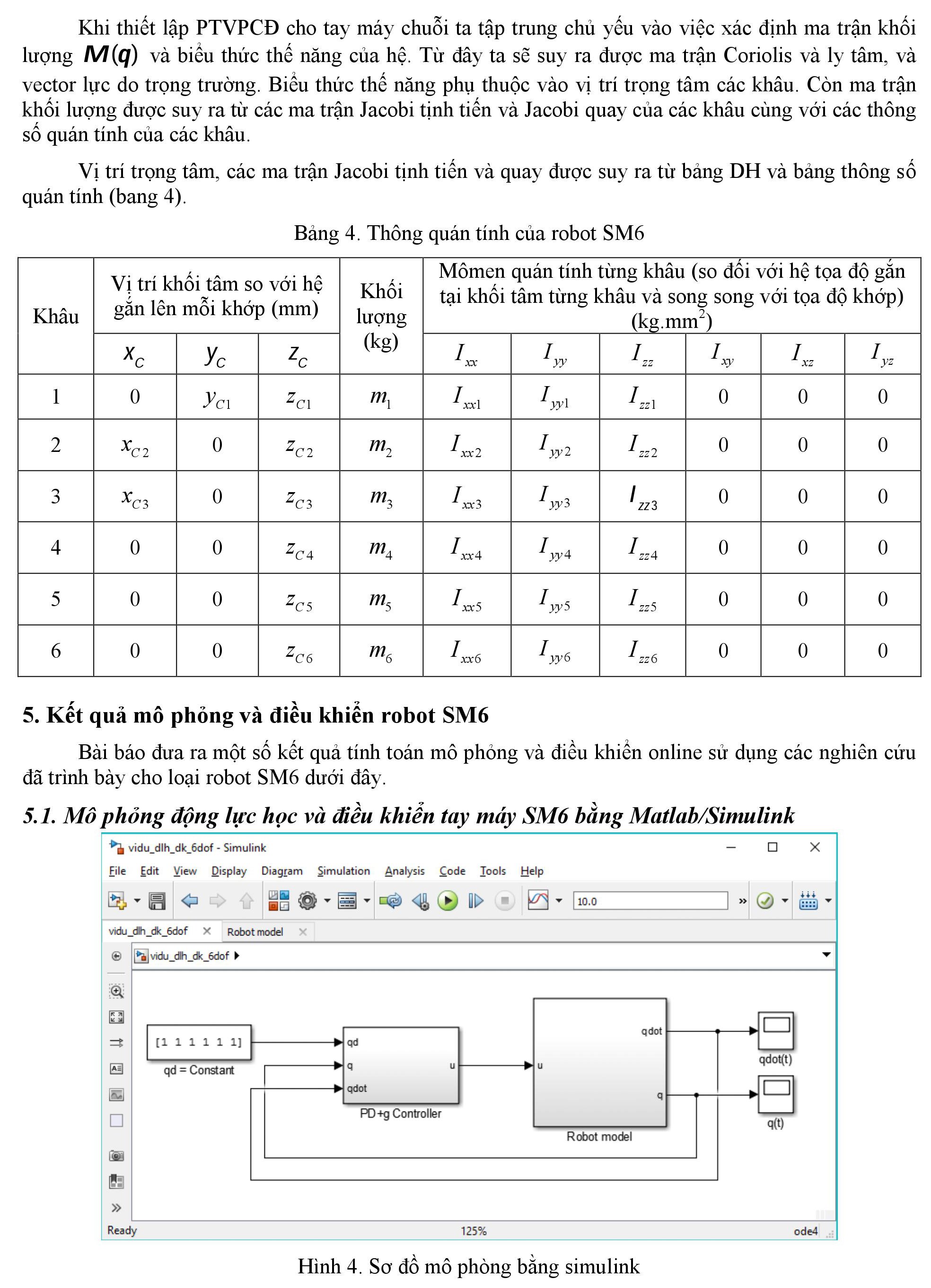
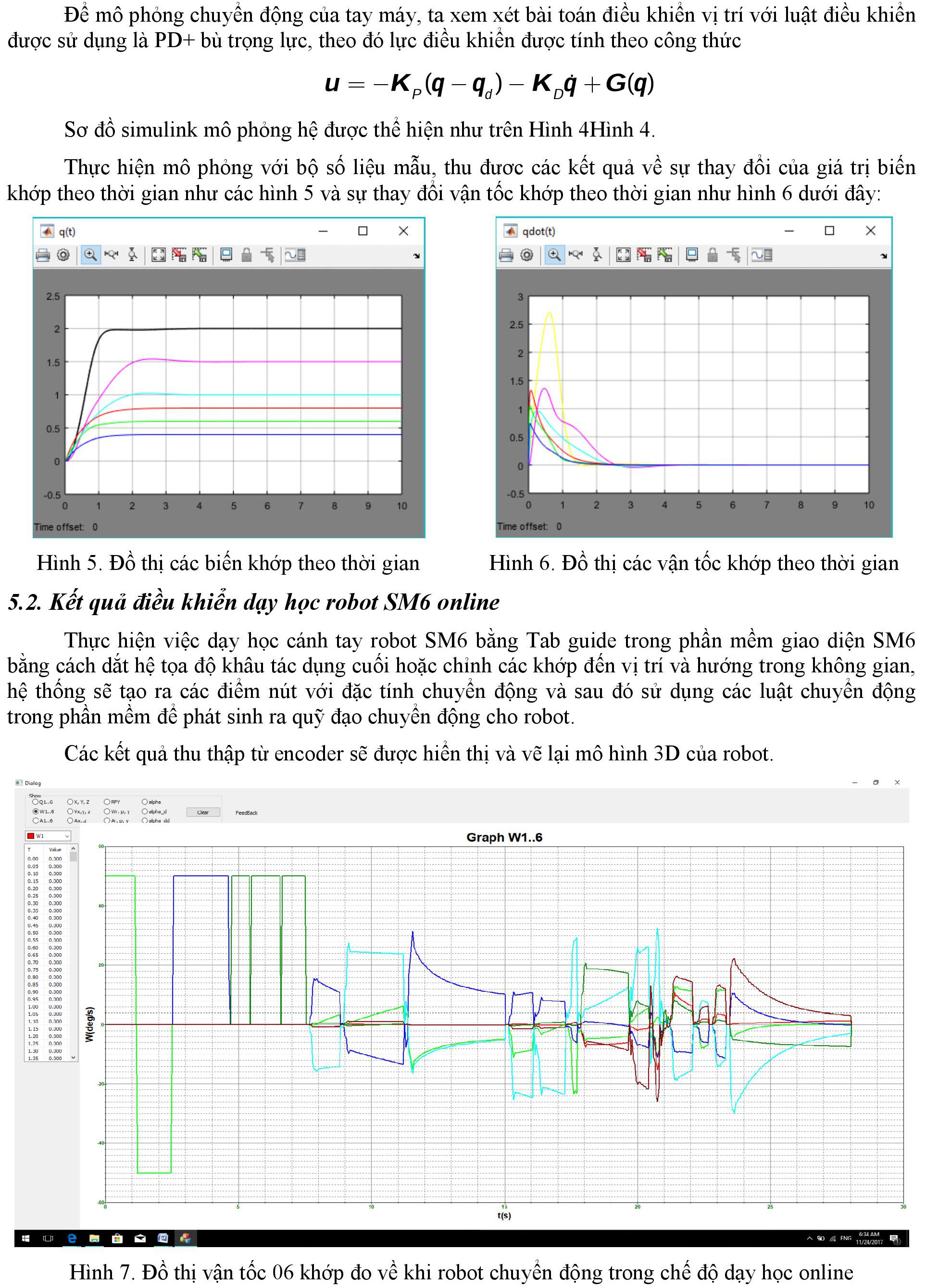
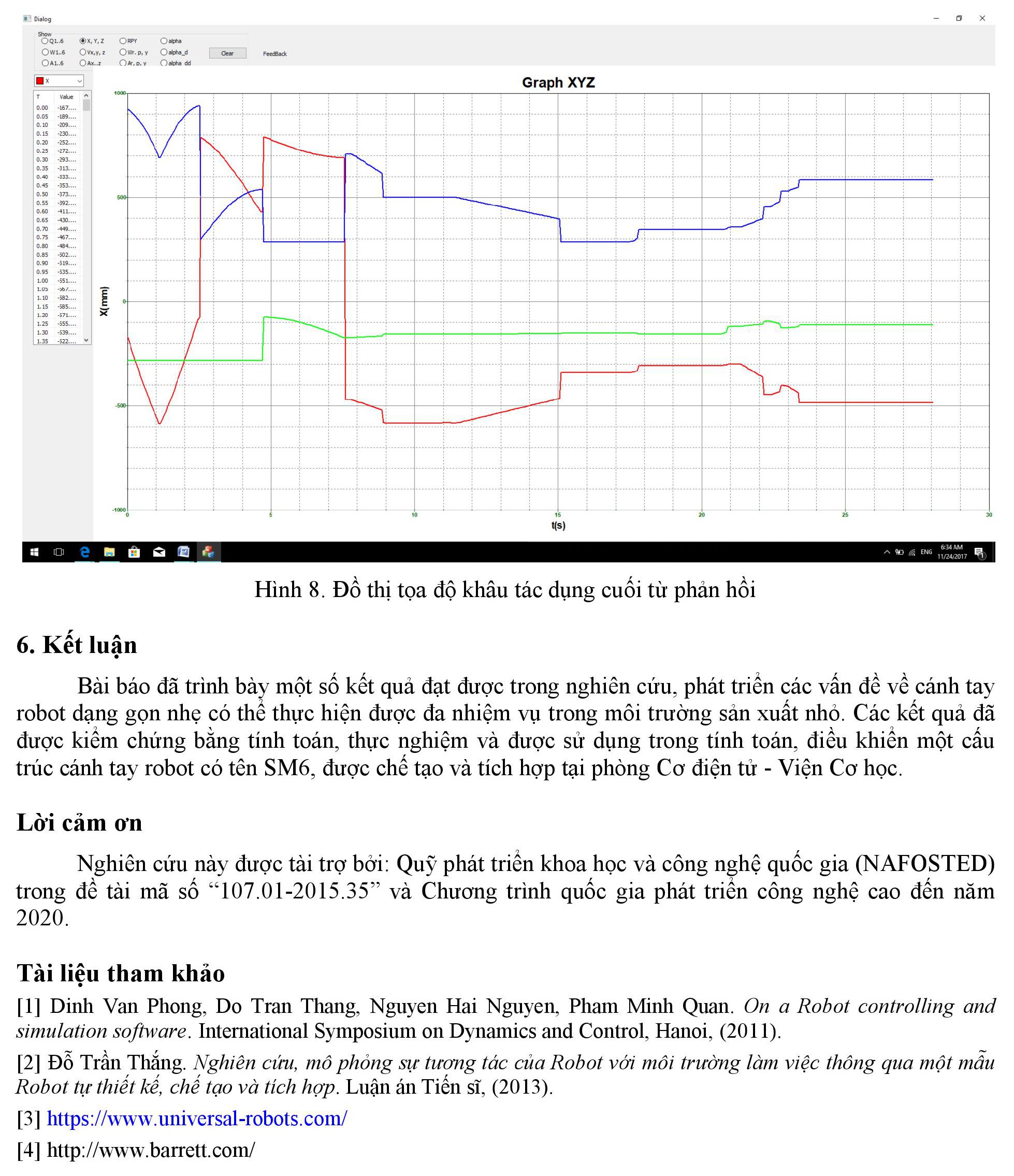
Thiết lập phương trình vi phân chuyển động và mô phỏng một cấu trúc tay máy 6 bậc tự do
Thứ năm, 20/02/2020 - 15:06
Nghiên cứu được thực hiện trong khuôn khổ Chương trình phát triển một số ngành công nghiệp công nghệ cao do Bộ Công Thương chủ trì, Viện Cơ học – Viện Hàn lâm Khoa học và Công nghệ Việt Nam triển khai thực hiện
Đỗ Trần Thắng, Lã Đức Việt, Đinh Văn Phong, Nguyễn Quang Hoàng,
Nguyễn Văn Quyền
Viện Cơ học – Viện Hàn lâm KH&CN Việt Nam
Trường Đại học Bách khoa Hà Nội